Manufacturing Engineer, Project Lead
Drive Unit, Stator - Tesla
At Tesla, I’m responsible for the launch and ramp of new stator manufacturing lines. I lead the design, process development, and validation of high-volume production equipment.
My role balances technical project management with hands-on process ownership as I continuously optimize equipment and process parameters through data-driven decisions.

SpaceX Starlink Solar Design
Summer 2024 - SpaceX
At SpaceX, I supported development of the next generation of Starlink satellites on the Solar team. I primarily focused on mechanism design and testing.
Some highlights include:
Designed mechanisms and solutions to reduce solar array displacement during liftoff and engine cutoff events
Developed ground testing strategy and worked with dynamics team to characterize system stiffness
Performed fault injection testing to evaluate root cause and damage propagation of on-orbit power harness failures
Prototyped new mechanism for solar array retention with reduced mass and area for collision avoidance
Created process for new small-scale vibration testing of arrays to reduce need for full satellite tests

Rivian Enduro Stator Line
Summer/Fall 2023 - Rivian
At Rivian, I was the onsite representative for the Manufacturing Engineering team on the Enduro Stator line, which produces in-house motors for Rivian’s cars, trucks, and vans. I supported continuous improvement and ramp of the line, and worked closely with the onsite cross-fuctional teams.
Some highlights include:
Developed TIG weld repair process and equipment to save over $250k
Procured and installed lift assist tooling on the line and rework area to reduce lift strain
Conducted root cause analysis to support line uptime and prevent future downtime events
Designed fixtures to mitigate operator error and improve line uptime
Created dashboards and data visualization tools for cross-functional teams to use
Coordinated activity between integrator and onsite teams for future line development

Tesla Powerwall 3 Pilot Line
Fall 2022 - Tesla
At Tesla, I supported the development of the Powerwall 3 pilot line during its early stages. I worked closely with the NPI team to begin production and conduct builds to guide development of the future automated line.
Some highlights include:
Designed cell compression fixture for prep of prismatic cells to decrease cycle time
Implemented HV tester connectors for faster probing of product during electrical testing
Created layout + kitting equipment and processes for line packout area
Supported process and NPI teams through fixture development to improve ergonomics

Portable Autonomous Testing Computer
Summer 2022 - Georgia Tech Research Institute
For conducting simulated tests of aircraft communication systems, the engineering teams in the Aerospace, Transportation & Advanced Systems Laboratory (ATAS) used testing kits with NVIDIA Jetsons. The previous testing kits were large, heavy, and loud, making them difficult to use and travel with.
I designed and built a compact testing rig with 2x NVIDIA Jetsons, all necessary I/O, a power supply, and adequate cooling, designed for easy serviceability. This package was quiet enough for use in office spaces, but also easy to pack and travel with when necessary.
At GTRI, I also worked on general fixture design and data collection for unmanned aircraft systems.
Projects & Organizations
-

RoboJackets - RoboCup
RoboCup is one of six robotics teams within RoboJackets, the primary student robotics organization at Georgia Tech. Our team creates small autonomous robots to play soccer and compete in RoboCup SSL, an international research competition and soccer tournament.
As the team’s former mechatronics lead, I oversaw the design and fabrication of our fleet. I led a redesign of all major systems and expanded the team’s budget to accommodate a fleet expansion.
-

HyTech Racing - Formula SAE Electric
HyTech Racing is Georgia Tech’s student-run Formula SAE electric racing team. Our team designs, fabricates, and tests fully electric formula-style vehicles to compete in annual FSAE competitions, which evaluate performance both on and off track through multiple events.
As the team’s former powertrain lead, I managed the powertrain and cooling systems of the car. I redesigned and optimized the car’s cooling loop while also reducing the powertrain system weight.

Powertrain Liquid Cooling Loop
Fall 2021 - HyTech Racing
Our car’s previous cooling loop was large, heavy, and unoptimized. The radiator was placed in a poor position with a high center of mass and minimal airflow, which meant it had to be oversized and supplemented with a fan for adequate performance.
By working with our aerodynamics team, I relocated the radiator to an airflow-optimized position. I also utilized previous car telemetry to gather power and efficiency data. Using this data, as well as part specifications and other input parameters, I conducted a thermodynamic steady-state heat analysis using EES to optimize component sizing. As a result, I was able to reduce the radiator’s cross-sectional area by 47% and mass by 66%.
In the end, I was able to install and validate the new cooling and powertrain systems through track testing.
Achievements:
3rd Place Overall in Formula SAE Electric Class 2022

Old vs New Radiator

Car Telemetry
Light-Year Express Competition Robot
Fall 2021 - ME2110 Creative Decisions & Design
Creative Decisions & Design is a project-based competition class at Georgia Tech required for all Mechanical Engineering students. Over 60 teams design and fabricate robots during the semester before competing. I was responsible for the design and CAD models for our team. For our design, I focused on modularity and ease of assembly, helping our team to succeed without spending significant additional time outside of class.
Our robot consisted of two distinct modules: a “hub” that featured a continuous elevator lift, and a “rover” that drove forward to retrieve a wooden block with the use of pneumatic actuators.
Achievements:
1st place design award

Final Robot

Robot Performing Trial Run

Custom DLP 3D Printer
Summer 2021 - Active Materials & Additive Manufacturing Lab
In this lab, I worked with a PhD student who was studying the anisotropy of 3D printed parts, including the ability to induce different effects with different patterns. To assist in testing, I designed a custom bottom-up resin 3D printer, created assembly plans, and developed a bill of materials. I also printed test strips and conducted tensile tests.

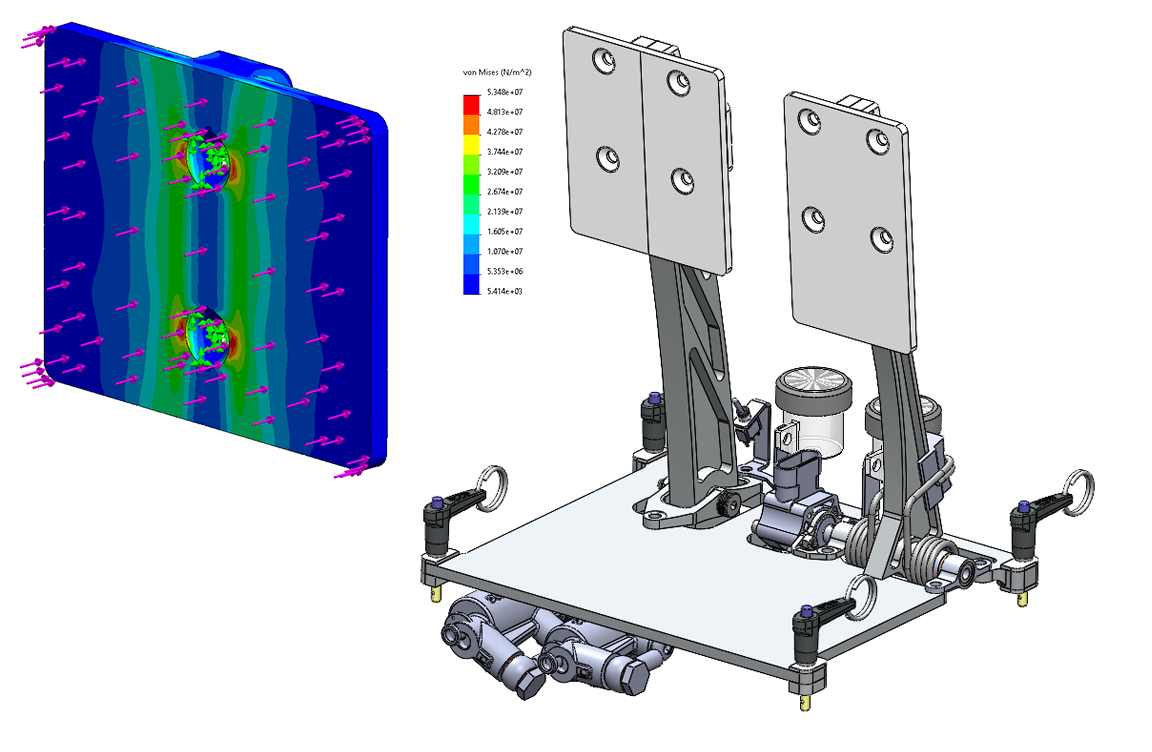
Powertrain Plates
Spring 2021 - HyTech Racing
To accommodate an alternative motor in our car, I modified previous mounting plates in SolidWorks to fit new mounting holes, cooling outlets, and electrical components. Using FEA, I verified that the plate would not fail under the torque and tension forces associated with the new motor. This change resulted in system weight being reduced by 22%.
Achievements:
2nd place overall in Formula SAE Electric Class 2021

3D Printed Molding Process
Spring 2021 - RoboCup
In RoboCup SSL, ball handling primarily occurs by applying backspin to the ball with a high speed roller. To improve ball handling performance, I created a roller that centered the ball during operation.
To accomplish this, I established and utilized an in-house 3D print molding process, which allowed agile prototyping of various designs. Through testing, I was able to finalize the design and replace the rollers on the existing fleet.
View more changes in our Team Poster.
Achievements:
3rd place in RoboCup SSL Division B 2021

Bubbl - Verification Kiosk
Spring 2021 - EGHI/GT Hack COVID-19
In this hackathon, a group of students and I proposed a noninvasive approach to COVID-19 contact tracing by developing a social networking app that organized “bubbles” of contact groups. I designed the physical kiosks that could be used to verify user statuses at critical locations (testing sites, classrooms, etc.).
Watch our video submission to learn more.
Achievements:
Finalist in EGHI/GT Hack COVID-19

Automated AC Switch
Fall 2020 - Flowers Invention Studio Hackathon
For this hackathon, I participated in a team of 5 students to develop a product for remote thermostat control and temperature scheduling of dormitory air conditioners. The device attached to existing air conditioner geometry and interfaced with a simple switch using a servo and 3D printed parts.
Achievements:
2nd place in Flowers Invention Studio Hackathon 2020
3D Printed Toe Plates
Fall 2020 - HyTech Racing
To address driver feedback about pedal ergonomics, I designed 3D printed plates to integrate with existing pedals. The main goals were to reduce toe slippage, improve driver feedback, and allow for more natural motion.
I iterated through multiple designs with the help of driver feedback. To comply with rules and maximize safety, I also analyzed the stress of the brake pedal during loading to ensure that failure would not occur.
The final plates were used in our competition vehicle.

FIRST Robotics Competition Robot
Spring 2019 - Storm Robotics Team
For two years, I served as Director of Design for my high school’s robotics team. I primarily designed components and drawings for our manufacturing team while handling cross-team part integration. I also trained new members and represented the team at large design reviews.
In my last year, I was additionally appointed team director. I led 50 students across three different subteams and expanded the team to underclassmen in order to improve team knowledge retention.

Underwater Remotely Operated Vehicle (ROV)
Summer 2017 - MATE ROV (Ranger Division)
I helped form a team of 5 students to compete in the MATE ROV underwater robotics competition. My main role was designing and integrating the watertight electronics enclosure and mechatronics systems. I also implemented serial communication over Arduino to reduce latency, tether diameter, and interference.
Achievements:
1st place internationally for team technical report
Lead author for publication detailing ROV development in IEEE’s Computer Magazine.